
In unserem März- Newsletter haben wir die Anforderungen an GPS-Empfänger für den neuen GIS-Antrag zusammengefasst und sind dabei hauptsächlich auf DGPS-Systeme eingegangen. In diesem Newsletter wollen wir näher auf RTK Systeme eingehen. Vorher müssen wir allerdings einige Begriffe erklären.
Zweifrequenzempfänger
Als Zweifrequenzempfänger (L1, L2) werden spezielle Empfänger für GNSS-Satellitensysteme (GPS, GLONASS, Galileo) bezeichnet, welche die von den Navigationssatelliten eintreffenden Funksignale auf zwei Frequenzen auswerten können. Da die Signalverzögerung auf dem Weg zur Erde abhängig von der Frequenz ist, kann man diese durch die Nutzung beider Frequenzen herausrechnen. Daher ist gegenüber einem Einfrequenzempfänger (L1) auch ohne Korrektursignal bereits eine höhere Genauigkeit möglich, man hat schneller eine genaue Position. Nachteil sind die wesentlich höheren Kosten dieser Systeme.
In der Praxis werden in RTK Systemen meistens Zweifrequenzempfänger eingesetzt, allerdings sind sie für RTK Systeme nicht zwingende Voraussetzung.
Je kürzer die Wellenlängen ein umso feineres Messinstrument sind sie
Basis für alle GPS- Verfahren ist die Bestimmung der Entfernung zwischen dem Empfänger und dem jeweiligen Satelliten. Bei RTK Systemen wird als Basis die Trägerphase des Satellitensignals genutzt, die L1 Trägerwelle hat eine Wellenlänge von 19,4 cm. Dadurch wird die prinzipiell mögliche Genauigkeit der Entfernungsbestimmung im Gegensatz zu den sonst zur Entfernungsmessung genutzten aufmodulierten Codes mit einer Wellenlänge von 293.05 m (C/A Code) oder 29.30 m (P-Code) wesentlich größer.
Korrektur der Uhrabweichungen
Der Großteil des GPS-Fehlers hat seine Ursache in der Unvollkommenheit der Empfänger- und Satellitenuhren. Diesen Fehler kann man mit der Technik des sogenannten „Double Differencing“ ausgleichen. Wenn zwei GPS-Empfänger zwei Satelliten anmessen, fällt bei der Bildung der Doppeldifferenzen der Versatz der Empfängeruhren und der Satellitenuhren aus der Rechnung heraus.
Entfernungsmessung zum Satelliten
Nachdem die Uhrenfehler aus der Rechnung herausgefallen sind, kann die ganze Anzahl der Trägerwellenlängen plus dem Bruchteil einer Wellenlänge zwischen dem Satelliten und der Empfängerantenne bestimmt werden. Während der Bruchteil der Wellenlänge genau bestimmbar ist (Phasenreststück), gibt es eine große Anzahl möglicher ganzer Wellenlängen zu jedem beobachteten Satelliten (sogenannte Phasenmehrdeutigkeiten).
Auflösung der Phasenmehrdeutigkeiten
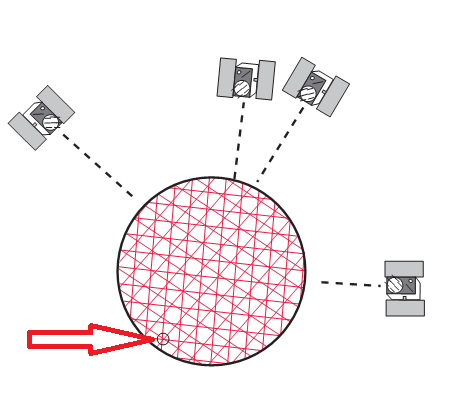
Prinzipiell kann man sich die Auflösung der Mehrdeutigkeiten folgendermaßen vorstellen:
Die zu bestimmende Position liegt im Kreis auf den Wellenfronten (rote Linien).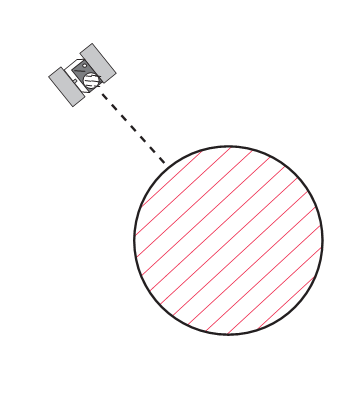
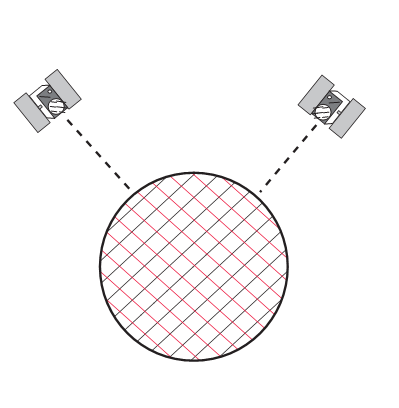
Wenn ein zweiter Satellit beobachtet wird, muss die zu bestimmende Position auf den Kreuzungspunkten der beiden Wellenfronten liegen.
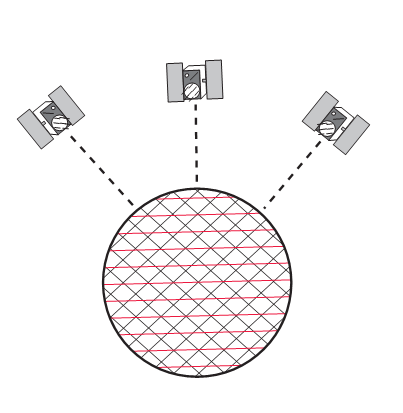
Die Beobachtung eines dritten Satelliten grenzt die Zahl der möglichen Positionen weiter ein,
durch einen vierten Satelliten verringert sich die Anzahl der möglichen Positionen (Anzahl Kreuzungspunkte) noch mal.
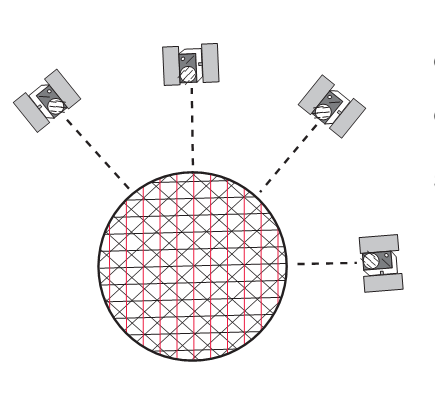
Bei einer Änderung der Satellitenkonstellation zeigt sich die Tendenz zu einer Rotation um dann nur noch einen Punkt und damit die wahrscheinlichste Lösung der Mehrdeutigkeiten.
Prinzipiell können je nach Empfangsbedingungen zum einen diese Phasenmehrdeutigkeiten geschätzt aber nicht bestimmt werden (float-Lösung) oder aber festgesetzt werden (fixed-Lösung).
Abbildungen Phasenmehrdeutigkeiten aus:
Einführung in die GPS Vermessung (Global Positioning System), Leica GPS Basics, Version 1.0
RTK System – Basisstationen und „Rover“
RTK (Real Time Kinematik) ist eine cm-genaue Echtzeitpositionierung auf der Grundlage dieser Phasendaten mit gelösten Mehrdeutigkeiten .
Die Referenzstation (Basisstation) ist mit einer Verbindung Funk/Internet versehen und sendet die Daten, die sie von den Satelliten empfängt. Der Rover ist ebenfalls mit einer Verbindung Funk/Internet ausgestattet und empfängt das von der Referenzstation bereitgestellte Signal. Des Weiteren empfängt der Rover Satellitendaten direkt von den Satelliten über seine eigene GPS-Antenne. Diese beiden Datensätze können im Rover-Empfänger weiterverarbeitet werden, um die Phasenmehrdeutigkeiten zu lösen und so eine hochgenaue Position in Bezug zum Referenzempfänger zu erhalten.
Sobald der Rover-Empfänger aktiviert ist und Satelliten empfängt sowie Daten von der Referenzstation erhält, kann er den Initialisierungsprozess beginnen. Mit Abschluss der Initialisierung sind die Phasenmehrdeutigkeiten gelöst und die Basislinie (Raumvektor) zwischen der eingemessenen Referenzstation und dem Rover kann permanent berechnet werden. Somit hat der Rover genaue Informationen über seine Position und kann hochgenaue Punktdaten und Koordinaten aufzeichnen.
Die Bestimmung der Phasenmehrdeutigkeiten wird „On-The-Fly“ fortgesetzt, wichtig dafür ist die permanente Verbindung per Funk/Internet zwischen Referenz und Rover.
RTK Referenzstation (Basisstation)
RTK funktioniert nur in einem eng begrenzten Gebiet um eine Referenzstation herum. Die maximal überwindbare Entfernung zwischen Referenzstation und Nutzer beträgt – insbesondere in Abhängigkeit des auf Relativbeobachtungen wirkenden Einflusses der Ionosphäre – zwischen 5 und 20 km. Bei größeren Entfernungen ist keine zuverlässige Mehrdeutigkeitslösung mehr zu erzielen und somit keine cm genaue Echtzeitpositionierung mehr durchführbar.
Alternative Netz-RTK (z.B. SAPOS HEPS)
Die präzise Positionierung wird bei Netz-RTK nicht nur in Bezug auf eine einzelne Referenzstation durchgeführt, sondern in Bezug auf ein Netz umliegender Referenzstationen. Ein solches Netz stellen bundesweit z.B. die Landesvermessungsämter mit dem System SAPOS HEPS (Satellitenpositionierungsdienst der deutschen Landesvermessung Hochpräziser Echtzeit Positionierungs-Service) zur Verfügung.
Die Begrenzung von RTK auf den Nahbereich um die Referenzstation wird durch die bei der relativen Positionierung entfernungsabhängig wirkenden Einflüsse der ionosphärischen und troposphärischen Störungen und der Einflüsse von Orbitfehlern verursacht. Gelingt es, diese relativen Einflüsse in Korrekturmodellen zu erfassen, kann die Reichweite der RTK-Positionierung deutlich vergrößert werden. Die Korrekturwerte sollten eine Genauigkeit von 1 cm und besser aufweisen. Sie können nur aus mehrdeutigkeitsfestgesetzten Phasenbeobachtungen hergeleitet werden. Voraussetzung für präzise Korrekturwerte ist somit die (vollständige) Mehrdeutigkeitsfestsetzung im Netz der Referenzstationen.
Die Korrekturmodelle sind so aufgebaut, dass sie die entfernungsabhängig wirkenden Einflüsse innerhalb des Netzes der Referenzstationen interpolieren. Mit ihrer Hilfe können Korrektionen für beliebige Basislinienvektoren im Gebiet des Referenzstationsnetzes erzeugt werden. Typische Anwendung ist die Berechnung von Korrektionen für die Basislinie zwischen einer gewählten Masterreferenzstation und der (Näherungs-) Position des Nutzers. Bringt man diese Korrektionen an die Beobachtungen der Master-Referenzstation an, so erhält man die Beobachtungen einer Virtuellen Referenzstation (VRS), die der Nutzer dann für die Durchführung seiner präzisen relativen Positionierung verwenden kann.
Trends GPS und Neuigkeiten im Webshop (www.exagt-shop.de)
Ab sofort haben ist in unserem Webshop (www.exagt-shop.de) eine Vermessungslösung mit RTK Genauigkeit auf der Basis SAPOS- HEPS verfügbar.. Sie basiert zum einen auf bewährte Komponenten (Toughpad FZ-M1, NAVIKAT Vermessung) mit einem RTK fähigen GNSS-Empfänger und einer hochwertigen GPS Antenne.
Fragen Sie uns, wir freuen uns auf Ihre Aufgaben! Unsere Spezialität sind betriebsspezifische Lösungen, wir schätzen Ihre Herausforderungen =;-).
Unsere Kontaktdaten sind:
arnim.grabo@exagt.de
+49 (0) 176 72588814, +49 (0) 34324 269737
andreas.schmidt@exagt.de
+49 (0) 173 352 8960, +49 (0) 34324 269739